研究概要

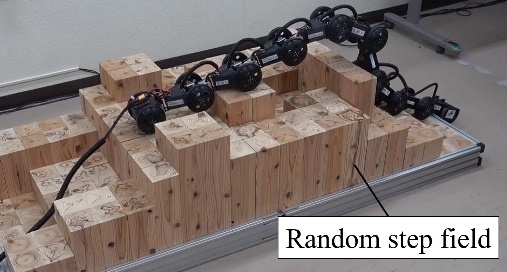
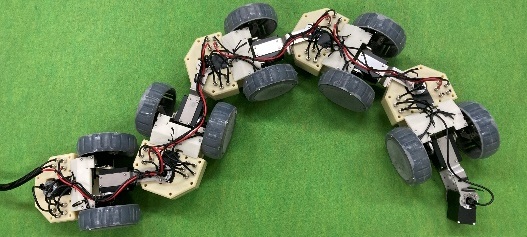

ヘビ型ロボットの運動制御を中心に、ロボットの動かし方に関する研究を行っています。ヘビは手や足を持たないシンプルな身体構造にも関わらず、非常に多彩な運動を実現しています。そんなヘビの構造や運動を模倣することで、多彩な環境に適応可能なロボットの開発を目指しています。ヘビのような単純な身体構造で様々な運動を実現するためには、どのように体を動かせばいいか、つまりロボットの動かし方を工夫する必要があります。私は力学・運動学的作用に基づいてロボットの動かし方を決定するアプローチで、ヘビ型ロボットの位置や姿勢を自在に制御する研究に取り組んでいます。また、ヘビ型ロボットの高い運動自由度を活用することで、推進だけではなくロボットによる軽作業や障害物回避や転倒回避といった、様々な副次的なタスクの実現にも取り組んでいます。 近年では子供型アンドロイドアバターの操作システムの開発にも関わっており、アバターを通した相互コミュニケーションに関する研究にも取り組んでいます。人に非常に近い見た目のアバターをユーザーが自在に操作することで、遠隔地からでも充実したコミュニケーションの実現を目指しています。
教員紹介

| 教員名 | 中島瑞(Mizuki NAKAJIMA)助教 |
| 所属学会 | 日本機械学会、日本ロボット学会 |
| 学位 | 博士(工学) (電気通信大学) |
| 職歴 | 2020年4月~2022年3月:電気通信大学 情報理工学研究科 機械知能システム学専攻 特任研究員 2022年4月~2023年8月:電気通信大学 情報理工学研究科 機械知能システム学専攻 特任助教 2023年9月~:東京電機大学未来科学部 助教 |
| 専門分野 | ロボティクス、制御工学 |
| 主な論文・著書 | https://ra-data.dendai.ac.jp/tduhp/KgApp?kyoinId=ymdegksyggy |