バイオロボティクス研究室
研究概要
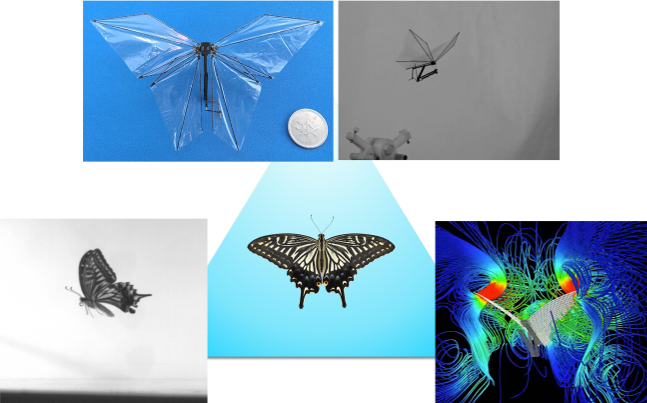
脚による歩行や鰭を使った遊泳、はねによるはばたき飛翔など、生物は陸・海・空での活動においてそれぞれの環境に適した移動様式を有しています。このような移動方法の違いだけではなく、サイズに着目しても、小さな昆虫のように体長数ミリメートル、質量数ミリグラムのものから、われわれヒトのようなメートル、キログラムのオーダのものまで、そのスケールは大小さまざまです。つまり、生物は長い進化の過程の中でそれぞれの生活環境に応じてサイズを変え、その環境とサイズに合った活動をするために最適な形態を獲得し、機能を発現してきました。
本研究室では、このような生物のもつ優れた構造や機能、動作に着目し、その中に隠された設計原理を解明するとともに、それらを応用したロボットを開発しています。
教員紹介

| 教員名 | 藤川 太郎(Taro FUJIKAWA) 准教授 |
| 所属学会 | 日本機械学会、日本ロボット学会、日本設計工学会、自動車技術会、IEEE |
| 学位 | 博士(工学) (千葉工業大学) |
| 職歴 | 2011〜2012:千葉工業大学 付属総合研究所 研究員 2012〜2018:東京電機大学 未来科学部 ロボット・メカトロニクス学科 助教 2019〜:東京電機大学 未来科学部 ロボット・メカトロニクス学科 准教授 |
| 専門分野 | ロボティクス、バイオミメティクス |
| 主な論文・著書 | https://ra-data.dendai.ac.jp/tduhp/KgApp?kyoinId=ymbggbyiggy |