情報駆動制御
Information-driven control laboratory
人と調和する機械ロボットを目指して制御工学を理論から実践まで研究します
岩瀬研究室とは

「人と調和する機械ロボット」を目指して,自転車やドローン,筋電義手などを対象に研究をしています.修士学生が多く,学部生でもたくさんの先輩の意見を聞ける環境で研究ができます.学会発表や共同研究の機会も多くあり,貴重な体験をすることができます.
代表的な研究テーマ
・森林調査用エンジン駆動型ドローンの開発
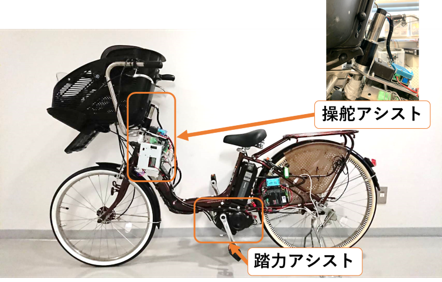
・安心安全快適を実現する幼児同乗用自転車の制御
・随意的な操作を体現する筋電義手の実現
キーとなる技術
制御工学,ロボティクス,モデリング技術
森林調査用エンジン駆動型ドローンの開発
Development of IC-engine-driven drone for autonomous forest inventory
研究目的・背景
本研究は森林が持つ機能や価値を安全かつ効率的に調査するエンジン型ドローンの開発を目的[1]としています.
日本国土の7割は森林に覆われており,日本人は古の時代から木と共に生活しています.森林は,木材としての利用価値に留まらず,バイオマスエネルギーとしての活用,二酸化炭素吸着や水源涵養,土石流の防止など自然保護など私たちの生活になくてはならない機能を多面的に供給しています.この森林の機能を保持するためには適切な「手入れ」が必要です.そのために,森林の現況や価値を適切に調査し,「森林の見える化」が重要となります.
研究成果・一押しのポイント
調査対象の森林は広大で急峻な傾斜地であることが多いです.これまでの人工作業では,計測器を担いで森林内をくまなく歩きまわり,時には滑落の危険性と隣り合わせでした.本エンジン駆動型ドローン[2]は,森林内を長時間飛行しながらデータを半自律的に収集できます.これにより,安全な場所からの調査が可能とし,調査効率の向上はもちろん,樹木形状など詳細なデータも計測可能になります.
[1] スマートフォレストリーIRT:https://www.ctrl.fr.dendai.ac.jp/SmartForest/
[2] Sato, Iwase, “Semi-Autonomous Flight Control of Forestry-Use Drone,” Proc. of SICE AC2019, FrA01 (2019)

安心安全快適を実現する幼児同上用自転車の制御
Control of bicycle for infants to realize safety, security and comfort
研究目的・背景
本研究は安心安全快適な幼児同上用自転車を制御により実現することを目的[3]としています.
日本では近年電動アシスト自転車の需要が増加しており,基準を満たせば幼児2人と大人1人での3人乗りが可能となっています.しかし,幼児が乗るとその重みで操作者の負担が増し,自転車がふらつくことで転倒のリスクが上昇します.私たちは,自転車本体を制御することでこのリスクを取り除くことを目指しています.そのために,自転車がどのような状況で安全な走行ができるのか調査する必要があります.
研究成果・一押しのポイント
これまでの研究で,人の操作を支援するアシスト機構[4]を開発しました.この機構を上図の実機へ実装し,適切に制御することで無人での走行と低走行時や停止時のふらつきの軽減を実現しました.現在は,自転車の走行状況に応じた制御をするために,自転車の詳細なモデルを基に実験やシミュレーションをすることで,自転車の安定性と操作性の向上を目指しています.
[3] Wada, Tani, Iwase, “Precise bicycle modeling and model-based stabilization control on state dependent Riccati equation,” IEEE, (09 October 2017)
[4] Sato, Iwase, “Control design of electrically-assisted steering systems for bicycles with child restraint seats,” IEEE, (02 October 2012)
随意的な操作を体現する筋電義手の実現
Realization of myoelectric prosthetic hand that embodies voluntary operations
研究目的・背景
本研究は角度制御による随意的な操作を体現する筋電義手の実現を目的[5]としています.
日本の上肢切断者はおよそ8万人にのぼります.そこで,上肢切断者の日常生活に必要な動作を実現する義手の研究開発が進められています.義手は能動義手,装飾義手,筋電義手の3種に分けられます.私たちはこのうち,装着者の筋電位を基にモータを駆動させることで手指の動作を実現できる筋電義手について研究しています.現在筋電義手には動作が途中で止められない,決まったパターンでしか動かせないという問題があります.この問題を解決するために,随意性のある動きを実現することが重要となります.
研究成果・一押しのポイント
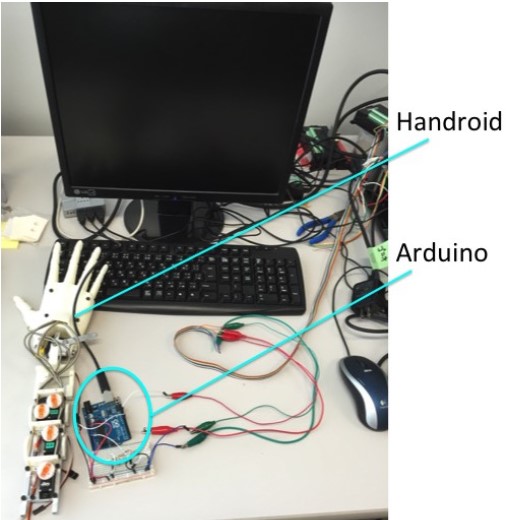
随意性のある動きを実現するために,筋電位信号と身体動作の関係を数式で表し,手首,肘,5指,拇指(親指)の関節角度の推定を行いました.その結果,筋電位信号を用いてモータを操作する精度や筋電位の識別精度が向上しました.右の実験では向上した精度を評価するために,手首の筋電位信号によりモータのついた棒を動かしたり,拇指の開閉時の金電位信号によりラジコンカーを操作したりしています.
[5] 廣木,岩瀬,”ハイブリッド手法による筋電義手の手指制御”,計測自動制御学会論文集Vol.48,No.9,1/11 (2017)
教員紹介

| 教員名 | 岩瀬 将美(Masami IWASE) 教授 |
| 所属学会 | 計測自動制御学会、日本機械学会、電気学会、日本シミュレーション学会、IEEE |
| 学位 | 博士(工学) (東京工業大学) |
| 職歴 | 2001~2004:東京電機大学理工学部 助手 2004~2007:東京電機大学理工学部 講師 2007~2018:東京電機大学未来科学部 准教授 2018〜:東京電機大学未来科学部 教授 |
| 専門分野 | 制御工学、ロボット工学 |
| 主な論文・著書 | https://ra-data.dendai.ac.jp/tduhp/KgApp?kyoinId=ymdegksyggy |
当研究室希望の方へ
システム制御は、実機への適用を前提とした実践的な学問であるため、制御理論に対する知識はもちろんのこと、対象物に対する知識、現象を感知する観察力、問題発見力と解決のための直観力が必要となる。これらを養うべく、研究室所属時(3、4年次)は、ハード的にしてもソフト的にしても実機もしくはプログラムを実際に設計・製作しながら、その制御にまつわる理論を学ぶこと中心に活動する。これは理論と現実のギャップを体感的に経験する重要なステップでもある。大学院では、理論と現実のギャップのように、実用性という側面を大切にしつつ理論的な造詣を深めることを目指す。4年次には国内学会、大学院では国際学会での学会発表ができるよう努力し、国内はもちろんのこと世界に通用するエンジニアを目指すことを切に望む。