ロボットは、モーターや油圧シリンダーなどの関節を駆動するアクチュエータと、それを結合するリンクから成り立っています。この講義では、3次元空間内のリンクの位置と姿勢が関節変位とどのような関係にあるのか、すなわちロボットを制御するうえで基礎となる運動学を学びます。ロボット運動学で学ぶ数学的な解析方法は、コンピュータグラフィックスの基礎理論とも共通するもので、とても応用範囲の広いものです。
ロボット運動学で学べること
ロボットを設計したい、動かしたいと思ったとき、一番初めに考えなくてはならないのがロボットの機構です。この授業の内容を身につけることで、みなさんは基本的なロボットの機構設計ができるようになります。
ロボットを設計したい、動かしたいと思ったとき、一番初めに考えなくてはならないのがロボットの機構です。この授業の内容を身につけることで、みなさんは基本的なロボットの機構設計ができるようになります。
カリキュラムについて
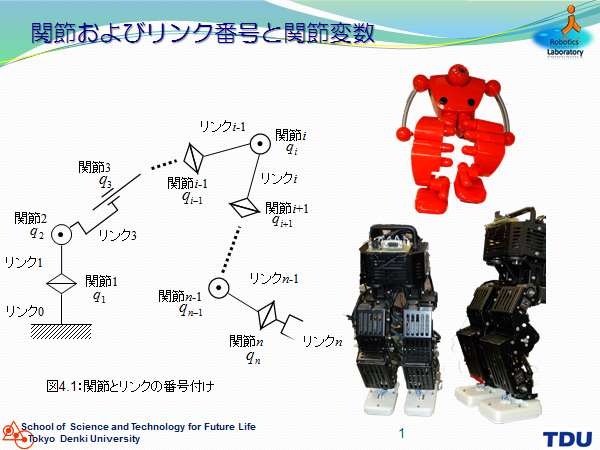
ロボットの機構系の幾何学的な関係を、同次変換行列やヤコビ行列などの数学的ツールを用いて解析できるようになることが、本講義の目的です。
変位との関係をはじめ、リンク速度と関節速度の関係、リンクにかかる静的な力のつりあいなどを理解していきます。具体的には、以下が達成目標です。
1 |
|
2 |
|
3 |
|
4 |
|
資料請求
ロボット・メカトロニクス学科についてもっと知りたい!と思われた方は、
こちらから資料請求してください。お待ちしております!
ロボット・メカトロニクス学科についてもっと知りたい!と思われた方は、こちらから資料請求してください。お待ちしております!
ロボット・メカトロニクス学科
石川研究室 | 石川 潤 教授
みなさんが将来作りたいものは何でしょうか?自動車、電車、飛行機、ゲーム・・・色々なものを作ってみたいと思っていることでしょう。実は、「ロボット運動学」で得られる知識は、ロボットだけでなく、世の中のいろいろな所で役に立っています。ロボット機構の基礎を学び、それをロボットだけはなく、エンジニアとしての夢の実現のために活用できるようになってください。